|
Mechanical and Aerospace Engineering
Dynamical Control Systems Laboratory Princeton University Princeton, NJ 08544 |
 |
|
Princeton: Naomi
Leonard, Clancy Rowley,
Ralf
Bachmayer, Josh Graver, Eddie Fiorelli, Pradeep Bhatta, Derek Paley.
Caltech: Jerry Marsden, Chad Coulliette, Francois Lekien, Shawn Shadden |
Monterey Bay '03 Experiment (August 3 - September 8, 2003)
Log entries: View | Post NewReal-Time Experimental Results
Proposed Plan for Adaptive Sampling Experiments in Monterey Bay '03 [doc]
Recent Publicity
New Jersey Public Television coverage on NJN News from 9/19/03. Use Real Player to watch. The story begins about 11 minutes into the program. Alternatively for higher quality, you can download an AVI file here , a zipped version can be found here. Copyright NJN News.Recent Publications
Cooperative Control of Mobile Sensor Networks: Adaptive Gradient Climbing in a Distributed EnvironmentSubmitted for publication
P. Ogren, E. Fiorelli and N.E. Leonard
Adaptive Sampling
Using Feedback Control of an Autonomous Underwater Glider Fleet
Proc. 13th International Symposium on Unmanned Untethered Submersible
Technology, E. Fiorelli, P. Bhatta, N.E. Leonard and I.Shulman.
Underwater Glider
Model Parameter Identification
Proc. 13th International Symposium on Unmanned Untethered Submersible
Technology, J.G. Graver, R. Bachmayer, N.E. Leonard and D.M. Fratantoni.
About AOSN II and Adaptive Sampling
 AOSN-II is an
ONR-sponsored, multi-institutional, collaborative research program with
the central objective "to quantify the gain in predictive skill for principal
circulation trajectories, transport at critical points and near-shore bioluminescence
potential in Monterey Bay as a function of model-guided, remote adaptive
sampling using a network of autonomous underwater vehicles". The overall
goals of adaptive sampling are presented below; a most important purpose
of adaptive sampling is to provide data for updating and evaluating forecast
models.
AOSN-II is an
ONR-sponsored, multi-institutional, collaborative research program with
the central objective "to quantify the gain in predictive skill for principal
circulation trajectories, transport at critical points and near-shore bioluminescence
potential in Monterey Bay as a function of model-guided, remote adaptive
sampling using a network of autonomous underwater vehicles". The overall
goals of adaptive sampling are presented below; a most important purpose
of adaptive sampling is to provide data for updating and evaluating forecast
models.
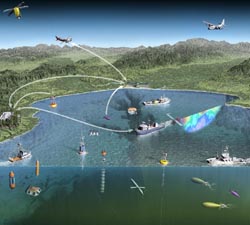
 In AOSN-II,
the underwater vehicle network features a fleet of autonomous underwater
gliders. Gliders are small, relatively simple and inexpensive, winged,
buoyancy-driven submersibles that have high endurance and are strongly
influenced by the currents. Adaptive sampling by the glider network should
exploit these capabilities (e.g., by taking advantage of current forecasts
to steer gliders efficiently) as well as the opportunity to use the glider
network itself as a re-configurable, mobile sensor array.
In AOSN-II,
the underwater vehicle network features a fleet of autonomous underwater
gliders. Gliders are small, relatively simple and inexpensive, winged,
buoyancy-driven submersibles that have high endurance and are strongly
influenced by the currents. Adaptive sampling by the glider network should
exploit these capabilities (e.g., by taking advantage of current forecasts
to steer gliders efficiently) as well as the opportunity to use the glider
network itself as a re-configurable, mobile sensor array.
MB'03, the first experiment in the AOSN-II program, is scheduled to take place in and around Monterey Bay in August 2003. There will be a number of data-collecting assets in addition to the glider network. For a description of the methods used to direct the glider fleet please see the adaptive sampling and forecasting plan [pdf], [doc]. The plan consists of five steps -
- Forecasting with HOPS-ESSE and ROMS.
- An integrated interpretation of the forecasts, forecast errors and dynamical hot spots (physical and/or coupled physical/biological).
- Analysis of the circulation fields by Lagrangian Coherent Structures (LCS).
- A collective decision by a Real Time Operations Committee (RTOC) as to what features and regions to be adaptively sampled the next day.
- Coordinated and cooperative control of the glider fleet using feedback.