Seth Blumberg, Joel Thompson, David Zaslavsky
The idea:
In the name of practicality, usefulness, and a little bit of fun, we decided to spend the second half of our semester building a laser-based microphone. The idea behind this was that sound waves will cause vibrations in a target, and so we want to read the vibrations of this target, such as your neighbor's window, by using the changing interference patterns of a laser beam reflected off that target from somewhere else, like your porch.
Operational Theory:
As the target moves back and forth due to sound vibrations, the phase of the reflected beam at the detector changes accordingly, and we can use its interference with another, local beam to determine the movement of the target.
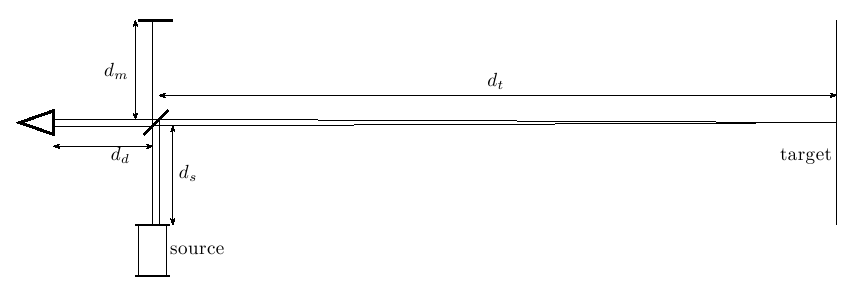
The source emits a laser beam which hits the beam splitter;
half of the beam gets sent to the target and then back to the beam
splitter; the other half of the beam gets sent to the mirror and then
back to the beam splitter; the beams then recombine, interfere, and hit
the detector.
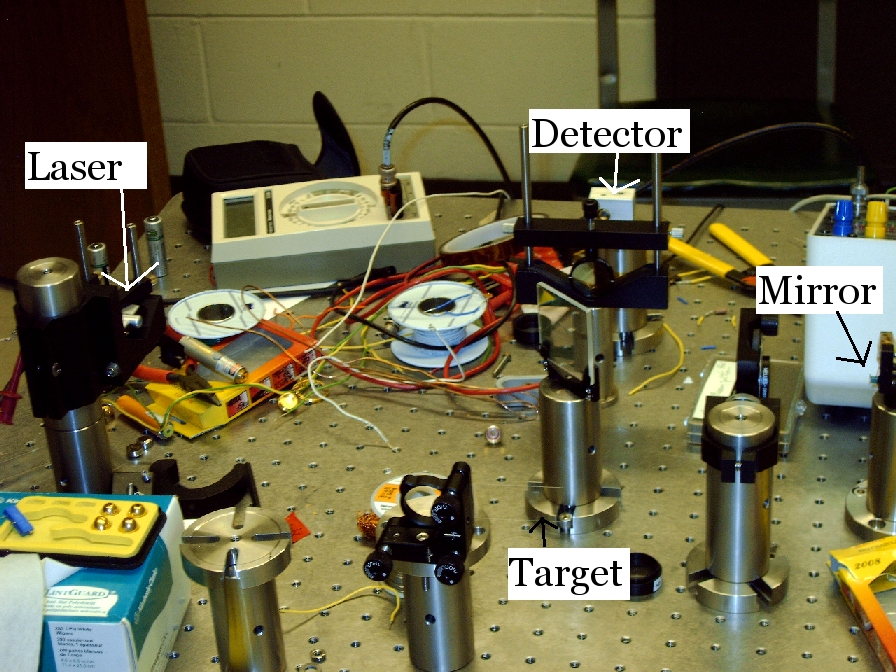
This is what our actual interferometer setup looked like. For reasons that will be explained later, our target is a small plastic slide glued onto a mirror mount.
The interferometer compares the relative phase of two paths of the laser light: (1) the path proceeding directly through the beam splitter, reflecting off the top mirror, and reflecting off the beam splitter to the detector, and (2) the path initially reflecting off the beam splitter, then reflecting off the target, and passing through the beam splitter to hit the detector. The two paths cover different distances: d = ds + 2dm + dd for one path, and d = ds + 2dt + dd for the other path. As a result, the two beams will probably be out of phase when they recombine, which creates the interference patterns. We plan to hold dm constant, and then dt will vary with time. This variation will be at the same frequency as the sound we wish to measure, so if we can measure this variation, we can recreate the sound.
The feedback control:
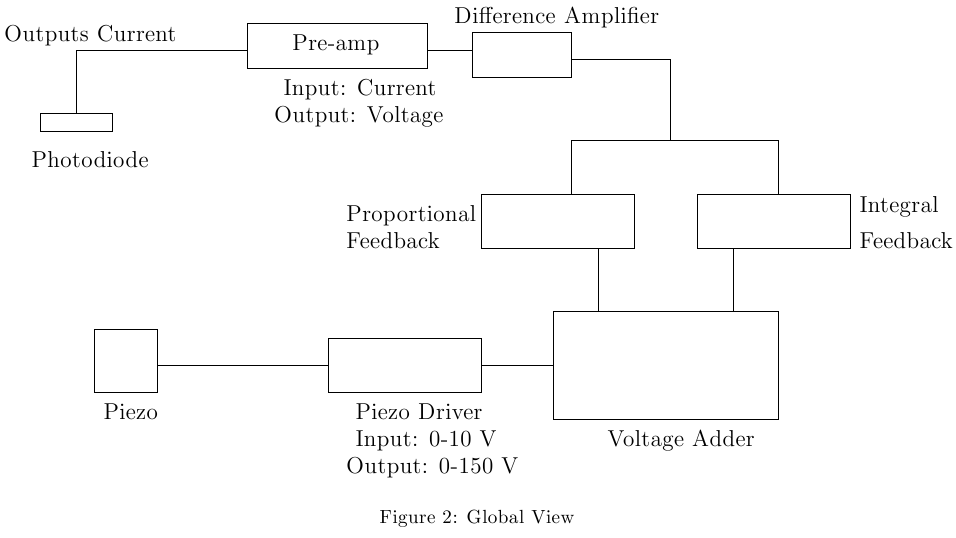
What happens if the target moves more than a wavelength of light? In this case, we won't be able to accurately reproduce the sound. To get around this, we designed a feedback circuit with the mirror glued onto a piezo (with epoxy) and then we try and keep the intensity at the detector approximately constant.We then need to measure the voltage going to the piezo to reproduce the sound (more on this later). The schematic view of our setup is as follows:
In the name of practicality, usefulness, and a little bit of fun, we decided to spend the second half of our semester building a laser-based microphone. The idea behind this was that sound waves will cause vibrations in a target, and so we want to read the vibrations of this target, such as your neighbor's window, by using the changing interference patterns of a laser beam reflected off that target from somewhere else, like your porch.
Operational Theory:
As the target moves back and forth due to sound vibrations, the phase of the reflected beam at the detector changes accordingly, and we can use its interference with another, local beam to determine the movement of the target.
This is what our actual interferometer setup looked like. For reasons that will be explained later, our target is a small plastic slide glued onto a mirror mount.
The interferometer compares the relative phase of two paths of the laser light: (1) the path proceeding directly through the beam splitter, reflecting off the top mirror, and reflecting off the beam splitter to the detector, and (2) the path initially reflecting off the beam splitter, then reflecting off the target, and passing through the beam splitter to hit the detector. The two paths cover different distances: d = ds + 2dm + dd for one path, and d = ds + 2dt + dd for the other path. As a result, the two beams will probably be out of phase when they recombine, which creates the interference patterns. We plan to hold dm constant, and then dt will vary with time. This variation will be at the same frequency as the sound we wish to measure, so if we can measure this variation, we can recreate the sound.
The feedback control:
What happens if the target moves more than a wavelength of light? In this case, we won't be able to accurately reproduce the sound. To get around this, we designed a feedback circuit with the mirror glued onto a piezo (with epoxy) and then we try and keep the intensity at the detector approximately constant.We then need to measure the voltage going to the piezo to reproduce the sound (more on this later). The schematic view of our setup is as follows:
We need the piezo
driver to amplify the voltage sent to the piezo; our circuit can't
produce the voltage necessary to drive the piezo. Because the photo
diode outputs current, we first run the output of that through a preamp
to convert it to voltage. Then, we run it through a difference
amplifier. The idea behind the difference amplifier is that the
detector will always output a non-zero current, but we want the average
signal into the feedback controllers to be 0 (especially the I
controller), so we can tweak the potentiometer in this layout to make
the output signal average to approximately 0.
Next, we need a proportional feedback controller; the output voltage of this controller will be directly proportional to the input voltage. For reasons to be discussed later, our P controller actually reduces the input voltage given to it. The gain of the two controllers is actually more relevant in the discussion on actually measuring the signal.
Next, we need a proportional feedback controller; the output voltage of this controller will be directly proportional to the input voltage. For reasons to be discussed later, our P controller actually reduces the input voltage given to it. The gain of the two controllers is actually more relevant in the discussion on actually measuring the signal.
We also need an
integral controller to cancel out some of the high-frequency noise,
such as drifts in the wavelength of the laser, as well as to help
dampen out oscillations about the set point. The output of this controller is proportional to the integral of the input voltage over time, with the gain equal to 1/(RC).
Finally, we have to add the output of the two controllers and run it into the piezo driver, which then goes to the piezo.
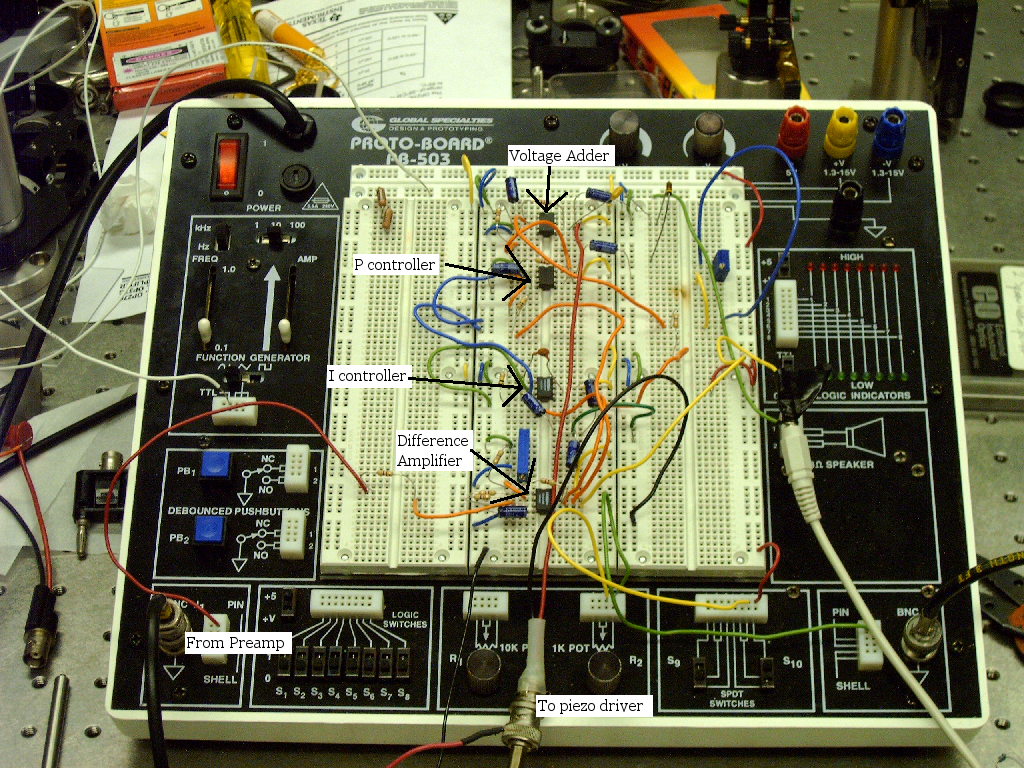
Before continuing, there is one more note to be made. There will be random fluctuations in the power supply of the op-amps, which will cause noise, and we want to minimize it. So we set up capacitors in parallel with the op-amp power supplies.
Here's what the electronics actually looked like:
Getting it set up:
There were several issues we had when trying to construct this circuit. One of the most prevalent, and most annoying, was the fact that our op-amps tended to burn out, which would cause our circuit not to perform as expected. Also, we initially had a mirror set up in a mount, but that didn't give us any signal. We eventually figured out that it was because the mirror was mounted so tightly that it couldn't vibrate well enough to give us a good signal. Then, we tried to just put a piece of glass on a stand, but that wasn't stable enough for our purposes, and we spent too much time trying to get everything realigned. So finally, we decided on superglueing a plastic slide to a mirror mount, which also makes it much more adjustable. However, this had its own problems, namely the resonance frequency of the mirror (measured at about 50 Hz). Finally, because our mirror reflected most of the laser light, and the glass slide much less, the reflection from the mirror was dominating the signal, and we weren't getting any interference patterns. To correct for this, we used light polarization filters, as the laser light was already polarized. By putting one filter on a mount that could rotate, we had an adjustable attenuator.
How it actually works:
When the distance the beam that bounces off the target changes, it changes the intensity of light the photo diode measures. As a result, it creates an error signal that gets fed into the PI controllers. The PI controllers amplify this signal and send it to the piezo driver, which then adjusts to drive that error signal back down to 0. So, for example, if the distance to the target gets lessened, then the piezo will expand by approximately the same amount to keep the difference between the distances approximately equal.
Measuring the signal:
There are actually two different places where we could measure the signal -- the input of the PI controllers, or their output. It all depends on the gain of the feedback circuits. If we have a very high gain, then the error signal (the input to the PI controllers) will be very small, as the circuit will correct very quickly. In this case, we would need to measure the output of the PI controllers. However, if we have a relatively low gain on the PI controllers, then the error signal will be relatively large, and so we will want to measure it instead. We found out that our gain was actually somewhere in the middle, but measuring the the error signal gave us the best sound.
Here's some sound files that we recorded. One issue with measuring the signal was that most headphones had a relatively low input impedance, so we hooked a computer microphone input up into our circuit to measure the signal and then just recorded it.
Here's some audio files we recorded, encoded into mp3 format:
This one is about 30 seconds long and includes some counting and a fair amount of noise.
This one is about 9 seconds long and includes some counting. If you listen closely enough, you can hear that Seth decided we should be counting Fibonacci numbers instead!
We also tried recording some music as well. It didn't pick up as well as voice did, but you can still hear it. Here is a 28-second recording of Rock Lobster being performed by the Princeton University Band, as played on their latest CD, "Songs to Beat Yale By." And here is a 52-second recording of "Ride of the Valkyrie."
Final setup:
Here's what the final setup looked like:

Future Improvements:
With more time, there's a couple of things we'd like to do. First, we'd like to set up a reset circuit for the I controller. If enough noise accumulates, then our capacitor will build up a charge, and we'd like to discharge it. The idea would be that we'd run the output of the PI controllers into two different difference amplifiers, and then if the voltage went above a set point, or below a different one, it would create a positive voltage output, which would open a FET (transistor) gate, and discharge the capacitor.
Also, we'd like to reduce the gain on the feedback controllers to make the sound quality better. We'd need to experiment a little bit to make sure the output of the P and I controllers is comparable and also to make sure that we don't lose lock.
Finally, it would be really cool to make a portable version of this. However, due to issues of coherence length (which is when the laser randomly jumps phase after travelling a certain distance), we'd need a fairly high-quality laser to avoid a really huge setup, so that we could put everything in a box and then just have a hole for the laser to go out of and come back into. We'd also need to make sure that whatever the box was sitting on was fairly steady and could be targeted accurately enough to get a signal.
The final report:
This HTML document is meant largely as an overview of our work. Our final report, containing much more detailed circuit diagrams and a lot of the mathematical justifications for our work, is available as a PDF file here.
Before continuing, there is one more note to be made. There will be random fluctuations in the power supply of the op-amps, which will cause noise, and we want to minimize it. So we set up capacitors in parallel with the op-amp power supplies.
Here's what the electronics actually looked like:
Getting it set up:
There were several issues we had when trying to construct this circuit. One of the most prevalent, and most annoying, was the fact that our op-amps tended to burn out, which would cause our circuit not to perform as expected. Also, we initially had a mirror set up in a mount, but that didn't give us any signal. We eventually figured out that it was because the mirror was mounted so tightly that it couldn't vibrate well enough to give us a good signal. Then, we tried to just put a piece of glass on a stand, but that wasn't stable enough for our purposes, and we spent too much time trying to get everything realigned. So finally, we decided on superglueing a plastic slide to a mirror mount, which also makes it much more adjustable. However, this had its own problems, namely the resonance frequency of the mirror (measured at about 50 Hz). Finally, because our mirror reflected most of the laser light, and the glass slide much less, the reflection from the mirror was dominating the signal, and we weren't getting any interference patterns. To correct for this, we used light polarization filters, as the laser light was already polarized. By putting one filter on a mount that could rotate, we had an adjustable attenuator.
How it actually works:
When the distance the beam that bounces off the target changes, it changes the intensity of light the photo diode measures. As a result, it creates an error signal that gets fed into the PI controllers. The PI controllers amplify this signal and send it to the piezo driver, which then adjusts to drive that error signal back down to 0. So, for example, if the distance to the target gets lessened, then the piezo will expand by approximately the same amount to keep the difference between the distances approximately equal.
Measuring the signal:
There are actually two different places where we could measure the signal -- the input of the PI controllers, or their output. It all depends on the gain of the feedback circuits. If we have a very high gain, then the error signal (the input to the PI controllers) will be very small, as the circuit will correct very quickly. In this case, we would need to measure the output of the PI controllers. However, if we have a relatively low gain on the PI controllers, then the error signal will be relatively large, and so we will want to measure it instead. We found out that our gain was actually somewhere in the middle, but measuring the the error signal gave us the best sound.
Here's some sound files that we recorded. One issue with measuring the signal was that most headphones had a relatively low input impedance, so we hooked a computer microphone input up into our circuit to measure the signal and then just recorded it.
Here's some audio files we recorded, encoded into mp3 format:
This one is about 30 seconds long and includes some counting and a fair amount of noise.
This one is about 9 seconds long and includes some counting. If you listen closely enough, you can hear that Seth decided we should be counting Fibonacci numbers instead!
We also tried recording some music as well. It didn't pick up as well as voice did, but you can still hear it. Here is a 28-second recording of Rock Lobster being performed by the Princeton University Band, as played on their latest CD, "Songs to Beat Yale By." And here is a 52-second recording of "Ride of the Valkyrie."
Final setup:
Here's what the final setup looked like:
Future Improvements:
With more time, there's a couple of things we'd like to do. First, we'd like to set up a reset circuit for the I controller. If enough noise accumulates, then our capacitor will build up a charge, and we'd like to discharge it. The idea would be that we'd run the output of the PI controllers into two different difference amplifiers, and then if the voltage went above a set point, or below a different one, it would create a positive voltage output, which would open a FET (transistor) gate, and discharge the capacitor.
Also, we'd like to reduce the gain on the feedback controllers to make the sound quality better. We'd need to experiment a little bit to make sure the output of the P and I controllers is comparable and also to make sure that we don't lose lock.
Finally, it would be really cool to make a portable version of this. However, due to issues of coherence length (which is when the laser randomly jumps phase after travelling a certain distance), we'd need a fairly high-quality laser to avoid a really huge setup, so that we could put everything in a box and then just have a hole for the laser to go out of and come back into. We'd also need to make sure that whatever the box was sitting on was fairly steady and could be targeted accurately enough to get a signal.
The final report:
This HTML document is meant largely as an overview of our work. Our final report, containing much more detailed circuit diagrams and a lot of the mathematical justifications for our work, is available as a PDF file here.